
PX սերիայի մանրանկարչության հոսանքի փոխանցման շարժիչ
Ընդհանուր ակնարկ
J-SZ(ZYT)-PX սերիայի մանրանկարչություն DC փոխանցման շարժիչները համապատասխանաբար կազմված են SZ(ZYT) սերիայի DC շարժիչներից և PX տիպի սովորական ճշգրիտ մոլորակային ռեդուկտորներից և հագեցած են էներգիայի մատակարարմամբ, որը կարող է իրականացնել արագության անխափան կարգավորում:Կարգավորման լայն տիրույթ, փոքր չափսեր, թեթև քաշ, բարձր արդյունավետություն, կոմպակտ կառուցվածք, մեծ ելքային ոլորող մոմենտ, լայնորեն օգտագործվում է ցածր արագություն, բարձր ոլորող մոմենտ և արագության անկայուն կարգավորում պահանջող կրիչներ:Անսահման փոփոխական արագություն:
PX սերիայի մոլորակային փոխանցման ռեդուկտորը կարող է ուղղակիորեն միացված լինել AC շարժիչներին, քայլային շարժիչներին և այլ շարժիչներին:
PX շարքը կարող է նաև ուղղակիորեն միացված լինել ճիճու փոխանցման ռեդուկտորին և ցիկլոիդային պտտվող անիվի ռեդուկտորին՝ տարբեր արագության գործակիցներով կամ մեծ արագության գործակիցներով կրճատիչներ ձևավորելու համար:
Reducer մոդելի հրահանգ
Շարժիչային մոդել
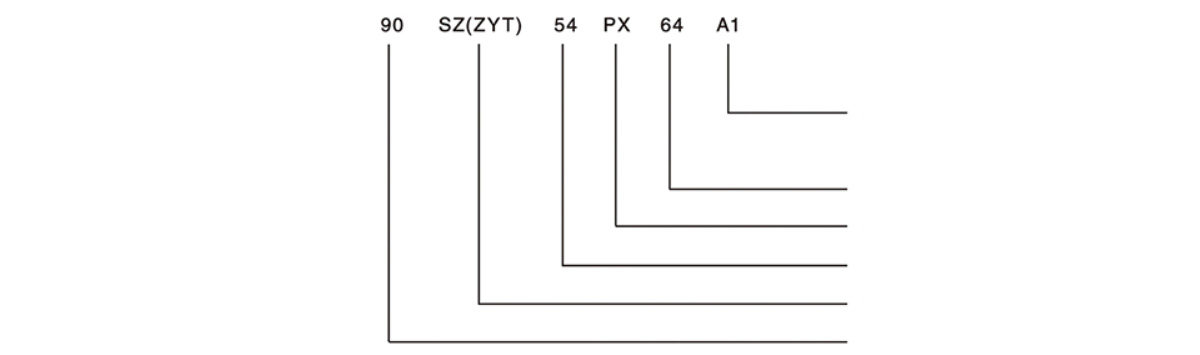
A1- տեղադրման ձևը. A1-ը ոտքով տեղադրում է, A3-ը եզրային տեղադրում է, B5-ը կլոր եզրի տեղադրում է
64 -Նվազեցման հարաբերակցությունը՝ 1:64
PX - սովորական ճշգրիտ մոլորակային ռեդուկտոր
54 - Շարժիչի աշխատանքի պարամետրի կոդը
SZ (ZYT) - DC Servo Motor (մշտական մագնիսական DC շարժիչ)
90 - Շարժիչի բազայի համարը. Ցույց է տալիս 90 մմ արտաքին տրամագիծը
Կրճատող մոդել
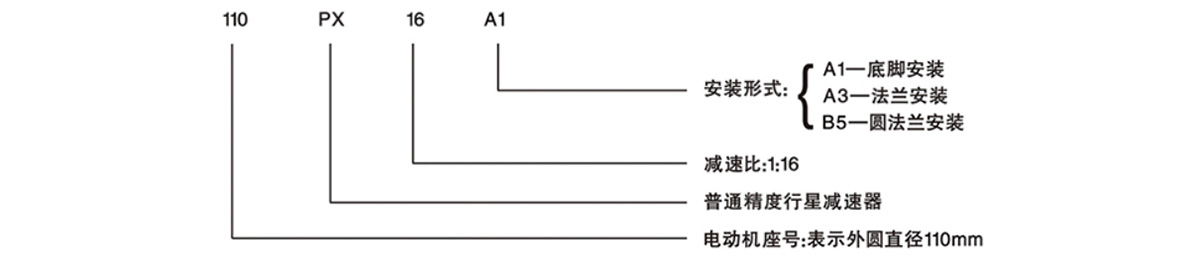
A1- տեղադրման ձևը. A1-ը ոտքով տեղադրում է, A3-ը եզրային տեղադրում է, B5-ը կլոր եզրի տեղադրում է
16 - Կրճատման հարաբերակցությունը` 1:64
PX - սովորական ճշգրիտ մոլորակային ռեդուկտոր
110 - Շարժիչի բազայի համարը. Ցույց է տալիս 90 մմ արտաքին տրամագիծը
Էլեկտրական շարժիչի տեխնիկական տվյալները
| Արագություն (r/min) | Ոլորող մոմենտ (mN.m) | Մոդել | Ուժ | Գնահատված արագություն (r/min) | Տեղադրեք | Գնահատված լարումը | Կրճատել հարաբերակցությունը | Դիտողություններ | |
| 750 թ | 260 թ | 55 ZYT | 29 | 3000 | A3 | 24V:55ZYT51 27V:55ZYT52 48V:55ZYT53 110V:55ZYT54 | 4 | ||
| 187.5 | 740 թ | 16 | |||||||
| 47 | 21200 թ | 64 | |||||||
| 12 | 5900 թ | 256 | |||||||
| 500 | 390 թ | 6 | |||||||
| 83 | 1660 թ | 36 | |||||||
| 14 | 7180 թ | 216 | |||||||
| 750 թ | 450 թ | 70ZYT01 | 50 | 30000 | 24 | 4 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 1500 թ | 380 թ | 70ZYT05 | 85 | 6000 | 24 | 4 | |||
| 70ZYT06 | 27 | ||||||||
| 70ZYT07 | 48 | ||||||||
| 70ZYT08 | 110 | ||||||||
| 750 թ | 630 թ | 70ZYT51 | 70 | 3000 | 24 | 4 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 1500 թ | 540 թ | 70ZYT55 | 120 | 6000 | 24 | 4 | |||
| 70ZYT56 | 27 | ||||||||
| 70ZYT57 | 48 | ||||||||
| 70ZYT58 | 110 | ||||||||
| 187.5 | 1270 թ | 70ZYT01 | 50 | 3000 | 24 | 16 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 187.5 | 1780 թ | 70ZYT51 | 70 | 3000 | 24 | 16 | |||
| 70ZYT52 | 27 | ||||||||
| 70ZYT53 | 48 | ||||||||
| 70ZYT54 | 110 | ||||||||
| 47 | 3670 թ | 70ZYT01 | 50 | 3000 | 24 | 64 | |||
| 70ZYT02 | 27 | ||||||||
| 70ZYT03 | 48 | ||||||||
| 70ZYT04 | 110 | ||||||||
| 750 թ | 360 թ | 70SZ01 | 40 | 3000 | 24 | 24 | 4 | ||
| 70SZ02 | 27 | 27 | |||||||
| 70SZ03 | 48 | 48 | |||||||
| 70SZ04 | 110 | 110 | |||||||
PS շարքի ընդհանուր արագության հարաբերակցությունը
Մակարդակ 1: 4, 6
Միջնակարգ՝ 16, 24, 36
Մակարդակ 3: 64, 96, 144, 216
Մակարդակ 4՝ 256\384\576\864\1296
90PX սերիայի ոչ ստանդարտ արագության հարաբերակցություն
Մակարդակ 1: 3
Մակարդակ 2: 9, 12, 18
Մակարդակ 3: 27 , 48 , 54 , 72 , 108
Մակարդակ 4՝ 81 , 162 , 192 , 288 , 324 , 432 , 648
110PX սերիայի ոչ ստանդարտ արագության հարաբերակցություն
Մակարդակ 1: 5
Մակարդակ 2: 20, 25, 30
Մակարդակ 3՝ 80 , 100 , 120 , 125 , 150 , 180
Մակարդակ 4՝ 320 , 400 , 480 , 500 , 600 , 625 , 720 , 750 , 900 , 1080
Կարող են նախագծվել ոչ ստանդարտ կրճատիչներ, ինչպիսիք են արագության հատուկ հարաբերակցությունը, արագությունը, տեղադրման չափը և այլն
Ընտրության օրինակ
Օգտագործողը կարող է ճիշտ ընտրել ռեդուկտորի հզորությունը և մոդելը՝ ըստ փաստացի աշխատանքային համակարգի և բեռի բնույթի՝ հղում կատարելով հետևյալ բովանդակությանը:
1.Ըստ բեռնվածքի ոլորման և ռեդուկտորի ելքային արագության՝ պահանջվող հզորությունը կարելի է հաշվարկել հետևյալ բանաձևով՝ P=T n/kh.
Բանաձևում. P- ելքային հզորություն WT - բեռնման ոլորող մոմենտ Nm, ընտրեք n- ելքային արագություն r/min ըստ տեխնիկական տվյալների թերթիկի
K- բեռի հաստատուն 9560 η - փոխանցման արդյունավետություն, ընտրված է հետևյալ աղյուսակից
Փոխանցման հարաբերակցությունը
| Փոխանցման գործակից (i) | 4 (6) | 16 (36) | 64 (216) | 256 (1296) |
| η | 0,76 | 0,72 | 0,68 | 0,65 |
2.Շարժիչի կառավարիչը կարող է ընտրվել, որպեսզի գիտակցի ռեդուկտորի արագության աստիճանական փոփոխությունը O-ից մինչև անվանական արագություն:
3. Ըստ փաստացի աշխատանքային համակարգի և ծանրաբեռնվածության բնույթի, սպասարկման գործակիցը կարող է ընտրվել ծառայության գործակիցների աղյուսակի հիման վրա:Հաշվարկից հետո կարելի է որոշել ռեդուկտորի պահանջվող հզորությունը, և ըստ պահանջվող ելքային արագության՝ ռեդուկտորի մոդելը կարելի է ընտրել՝ հղում կատարելով տեխնիկական տվյալների աղյուսակին։
Աշխատանքային ինդեքսի թերթիկ
| Ամենօրյա աշխատանքային ժամ | Բեռնվածության մակարդակ | |||
| Միջին կայուն | Միջին կենսունակ | Ծանր ազդեցություն | ||
| 12 | 1 | 1.25 | 1.75 | |
| 24 | 1.25 | 1.50 | 2 | |
Օրինակ՝ եթե բեռը հավասար և կայուն է, շարժիչի պահանջվող անվանական հզորությունը 40 Վտ է, անվանական լարումը 110 Վ է, ելքային արագության հարաբերակցությունը 4 է, իսկ աշխատանքային ժամանակը օրական 12 ժամ է, ապա ընտրվում է 40 Վտ։Եթե բեռի բնույթը չափավոր թրթռում է.
Ապա՝ ա.Ծառայությունների շարքը 1.25 ընտրելու համար տես սպասարկման գործակիցների աղյուսակը:Պահանջվող հզորությունը W=40W*1.25=50W
բ.Ստուգեք տեխնիկական տվյալների թերթիկը լրացուցիչ J70SZ54P*4-ի համար
70PX առջևի եզր
70PX հետևի եզր
Ապրանքների կատեգորիաներ
-

DC կրճատման շարժիչ 15W30W60W90W120W200W300W slo...
-

12V24V մշտական մագնիս DC դանդաղեցման շարժիչ 1...
-

250W-600W 12-48V ավլիչի հիմնական խոզանակ շարժիչը...
-

96V7.5KW առանց խոզանակի մշտական մագնիսական մշտական շարժիչ ոչ...
-

Մոլորակային DC դանդաղեցման շարժիչ 42XA775 մեծ տ...
-

Xinda rv40 DC կրճատման տուրբինային շարժիչ 12 / 24v2...





