Էլեկտրական մեքենայի էլեկտրական կառավարման էությունը շարժիչի կառավարումն է:Այս հոդվածում արդյունաբերության մեջ սովորաբար օգտագործվող աստղ-եռանկյուն մեկնարկի սկզբունքը օգտագործվում է էլեկտրական մեքենաների կառավարումը օպտիմալացնելու համար, այնպես որ 48 Վ էլեկտրական շարժիչ համակարգը կարող է դառնալ 10-72 ԿՎտ շարժիչի շարժիչ հզորության հիմնական ձևը:Ամբողջ մեքենայի աշխատանքը երաշխավորված է, և միևնույն ժամանակ, փոքր մեքենաների և մինի մեքենաների էլեկտրաշարժման արժեքը զգալիորեն կրճատվում է,

Վերջերս կատարված ուսումնասիրության ընթացքում ես հասկացա, որ էլեկտրական մեքենաների կառավարումը իրականում շարժիչի կառավարումն է:Քանի որ այս հոդվածում ներառված գիտելիքները շատ ընդարձակ և մանրամասն են, եթե շարժիչի կառավարման սխեմայի օպտիմալացման սկզբունքը և գործընթացը մանրամասն նկարագրված են, ըստ հեղինակի կողմից ներկայումս կարդացած դասագրքերի, գիտելիքների միավորները բավարար են մենագրություն պատրաստելու համար: ավելի քան 100 էջով և ավելի քան 100000 բառով:Որպեսզի ինքնամեդիայի ընթերցողներին հնարավորություն ընձեռվի հասկանալ և տիրապետել նման օպտիմալացման մեթոդին հազարավոր բառերի սահմաններում:Այս հոդվածում կօգտագործվեն կոնկրետ օրինակներ՝ նկարագրելու էլեկտրական մեքենաների շարժիչի սխեմայի օպտիմալացման գործընթացը:
Այստեղ նկարագրված օրինակները հիմնված են Baojun E100-ի, BAIC EC3-ի և BYD E2-ի վրա:Երկու մոդելների միայն հետևյալ պարամետրերը պետք է փոխկապակցված լինեն, և միայն շարժիչի կառավարումն է օպտիմիզացված՝ այն օպտիմալացնելու համար 48V/144V DC երկվոլտ մարտկոցի համակարգի, AC 33V/99V երկլարման շարժիչի և շարժիչի շարժիչների մի շարքի մեջ: .Դրանց թվում շարժիչի վարորդի ուժային էլեկտրոնային համակարգը օպտիմալացման ողջ սխեմայի բանալին է, և հեղինակը ուշադիր և խորն է ուսումնասիրում այն:
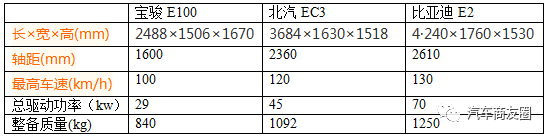
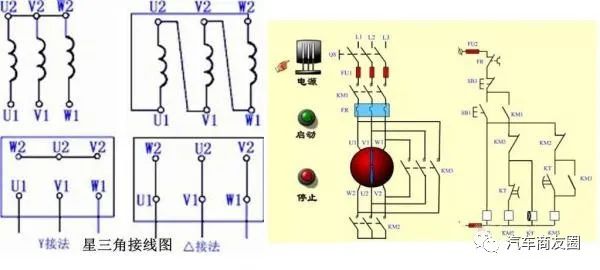
Այլ կերպ ասած, Baojun E100-ի, BAIC EC3-ի և BYD E2-ի շարժիչները պետք է օպտիմիզացվեն միայն 29-70 ԿՎտ հզորությամբ շարժիչի կառավարման համակարգի համար:Սրանք A00 մինի ավտոմեքենայի, A0 փոքր մեքենայի և A կոմպակտ մաքուր էլեկտրական մեքենայի ներկայացուցիչներ են:Այս հոդվածը կօգտագործի արդյունաբերական եռաֆազ ասինխրոն շարժիչի կառավարման մեթոդը՝ այն կիրառելու էլեկտրական տրանսպորտային միջոցների շարժիչների կառավարման համար աստղաեռանկյուն, V/F+DTC եռաֆազ ասինխրոն ինդուկցիոն շարժիչի կառավարման միջոցով:
Տիեզերքի սահմանափակության պատճառով այս հոդվածը չի բացատրի աստղային եռանկյունու և այլնի սկզբունքները։Սկսենք արդյունաբերական շարժիչների կառավարման ընդհանուր շարժիչի հզորությունից:Սովորաբար օգտագործվող 380 Վ եռաֆազ ասինխրոն շարժիչը 0,18 ~ 315 ԿՎտ է, փոքր հզորությունը՝ Y միացում, միջին հզորությունը՝ △ միացում, իսկ բարձր հզորությունը՝ 380/660 Վ շարժիչ:Ընդհանուր առմամբ, 660 Վ լարման շարժիչները 300 ԿՎտ-ից բարձր հիմնական շարժիչներն են:Այնպես չէ, որ 300 ԿՎտ-ից բարձր շարժիչները չեն կարող օգտագործել 380 Վ, այլ նրանց տնտեսությունը լավ չէ:Հոսանքն է, որը սահմանափակում է շարժիչի տնտեսությունը և կառավարման սխեման:Սովորաբար 1 քառակուսի միլիմետրը կարող է անցնել 6Ա հոսանք։Եռաֆազ ասինխրոն ինդուկցիոն շարժիչի նախագծումից հետո որոշվում է նրա շարժիչի ոլորուն մալուխը:Այսինքն՝ որոշվում է միջով անցնող հոսանքը։Արդյունաբերական շարժիչների տեսանկյունից 500A-ն ամենամեծ արժեքն է նրա տնտեսության համար:
Վերադառնալով էլեկտրական մեքենայի շարժիչին, 48 Վ մարտկոցային համակարգի PWM եռաֆազ լարումը 33 Վ է:Եթե արդյունաբերական շարժիչի տնտեսական հոսանքը 500 Ա է, ապա 48 Վ էլեկտրական մեքենայի առավելագույն տնտեսական արժեքը մոտ 27 ԿՎտ է եռաֆազ ինդուկցիոն շարժիչի համար:Միևնույն ժամանակ, հաշվի առնելով մեքենայի դինամիկ բնութագրերը, առավելագույն հոսանքի հասնելու ժամանակը շատ կարճ է, սովորաբար ոչ ավելի, քան մի քանի րոպե, այսինքն, 27 ԿՎտ կարող է ծանրաբեռնված վիճակի վերածվել:Սովորաբար ծանրաբեռնվածության վիճակը նորմալ վիճակից 2-ից 3 անգամ է:Այսինքն նորմալ աշխատանքային վիճակը 9 ~ 13,5ԿՎտ է։
Եթե մենք նայենք միայն լարման մակարդակի և ընթացիկ հզորության համապատասխանությանը:48 Վ համակարգը կարող է լինել միայն 30 ԿՎտ-ի սահմաններում, քանի որ վարման արդյունավետությունը լավագույն աշխատանքային պայմանն է:
Այնուամենայնիվ, եռաֆազ ասինխրոն շարժիչների հսկողության բազմաթիվ մեթոդներ կան:Էլեկտրական մեքենաներն ունեն արագության կարգավորման լայն շրջանակ (գրեթե 0-100%) և ոլորող մոմենտների կառավարման միջակայքը (գրեթե 0-100%):Ծանր աշխատանքային պայմաններում էլեկտրական մեքենաները ներկայումս հիմնականում օգտագործում են VF կամ DTC հսկողություն:Եթե ներդրվի աստղ-դելտա հսկողություն, դա կարող է առաջացնել անսպասելի ազդեցություն:
Արդյունաբերական հսկողության դեպքում աստղաեռանկյունի կառավարման լարումը 1,732 անգամ է, ինչը ավելի շուտ պատահականություն է, քան սկզբունք:48V համակարգը չի բարձրացնում PWM հաճախականության մոդուլյացիան՝ AC 33V դարձնելու համար, իսկ արդյունաբերական շարժիչի լարման մակարդակի համաձայն նախագծված շարժիչը 57V է:Բայց մենք աստղ-եռանկյունի կառավարման լարման մակարդակը կարգավորում ենք 3 անգամ, որը 9-ի արմատն է:Այդ դեպքում դա կլինի 99 Վ:
Այսինքն, եթե շարժիչը նախագծված է որպես 99V AC եռաֆազ ասինխրոն շարժիչ՝ եռանկյուն միացումով և 33V Y միացումով, շարժիչի արագությունը կարող է կարգավորվել 0-ից մինչև 100%՝ 20-ից 72 ԿՎտ հզորության միջակայքում տնտեսական պայմաններում: պայմանները.Սովորաբար շարժիչի առավելագույն արագությունը 12000 RPM է), ոլորող մոմենտների կարգավորումը՝ 0-100%, իսկ հաճախականության մոդուլյացիան՝ 0-400 Հց։
Եթե հնարավոր լինի իրականացնել օպտիմալացման նման սխեման, ապա A դասի մեքենաները և մանրանկարչական մեքենաները կարող են լավ արդյունք ստանալ մեկ շարժիչի միջոցով:Մենք գիտենք, որ 48 Վ շարժիչային համակարգի արժեքը (30 ԿՎտ առավելագույն արժեքի սահմաններում) կազմում է մոտ 5000 յուան:Այս հոդվածում օպտիմալացման սխեմայի արժեքը անհայտ է, բայց այն չի ավելացնում նյութեր, այլ միայն փոխում է կառավարման մեթոդը և ներկայացնում է լարման երկակի մակարդակ:Նրա ինքնարժեքի բարձրացումը նույնպես վերահսկելի է։
Իհարկե, նման վերահսկողության սխեմայում շատ նոր խնդիրներ կլինեն։Ամենամեծ խնդիրներն են շարժիչի դիզայնը, վարորդի դիզայնը և բարձր լարման մարտկոցների փաթեթի լիցքավորման և լիցքաթափման բնութագրերի շատ բարձր պահանջները:Այս խնդիրները վերահսկելի են, և առկա են լուծումներ։Օրինակ, շարժիչի դիզայնը կարող է լուծվել բարձր և ցածր լարման մակարդակների հարաբերակցությունը կարգավորելու միջոցով:Մենք դա միասին կքննարկենք հաջորդ հոդվածում։
Հրապարակման ժամանակը՝ Մար-02-2023