Էլեկտրաէներգիայի մատակարարումը անջատելուց հետո շարժիչը դեռ պետք է որոշակի ժամանակ պտտվի, մինչև այն դադարեցնի իր սեփական իներցիայի պատճառով:Իրական աշխատանքային պայմաններում որոշ բեռներ պահանջում են շարժիչի արագ դադարեցում, ինչը պահանջում է շարժիչի արգելակման կառավարում:Այսպես կոչված արգելակումը շարժիչին տալիս է պտտման ուղղությանը հակառակ ոլորող մոմենտ, որպեսզի այն արագ կանգնի:Ընդհանուր առմամբ կան երկու տեսակի արգելակման մեթոդներ՝ մեխանիկական արգելակում և էլեկտրական արգելակում:
Մեխանիկական արգելակումը օգտագործում է մեխանիկական կառուցվածք՝ արգելակումը ավարտելու համար:Նրանցից շատերն օգտագործում են էլեկտրամագնիսական արգելակներ, որոնք օգտագործում են աղբյուրների կողմից առաջացած ճնշումը՝ արգելակային բարձիկները (արգելակման կոշիկներ) սեղմելու համար՝ արգելակման անիվների հետ արգելակման շփում ստեղծելու համար:Մեխանիկական արգելակումը բարձր հուսալիություն ունի, բայց այն կստեղծի թրթռում, երբ արգելակում է, իսկ արգելակման ոլորող մոմենտը փոքր է:Այն սովորաբար օգտագործվում է փոքր իներցիայով և ոլորող մոմենտ ունեցող իրավիճակներում:
Էլեկտրական արգելակումը առաջացնում է էլեկտրամագնիսական ոլորող մոմենտ, որը հակառակ է ղեկին շարժիչի կանգառի գործընթացում, որը գործում է որպես արգելակման ուժ՝ շարժիչը կանգնեցնելու համար:Էլեկտրական արգելակման մեթոդները ներառում են հակադարձ արգելակումը, դինամիկ արգելակումը և վերականգնողական արգելակումը:Դրանցից հակադարձ միացման արգելակումը սովորաբար օգտագործվում է ցածր լարման և փոքր հզորության շարժիչների վթարային արգելակման համար.վերականգնողական արգելակումը հատուկ պահանջներ ունի հաճախականության փոխարկիչների համար:Սովորաբար վթարային արգելակման համար օգտագործվում են փոքր և միջին հզորության շարժիչներ:Արգելակման աշխատանքը լավ է, բայց արժեքը շատ բարձր է, և էլեկտրացանցը պետք է կարողանա ընդունել այն:Էներգիայի հետադարձ կապը անհնար է դարձնում արգելակել բարձր հզորության շարժիչները:
Ըստ արգելակման դիմադրության դիրքի՝ էներգիա սպառող արգելակումը կարելի է բաժանել DC էներգիա սպառող արգելակման և AC էներգիա սպառող արգելակման:DC էներգիա սպառող արգելակման ռեզիստորը պետք է միացված լինի ինվերտորի DC կողմին և կիրառելի է միայն սովորական DC ավտոբուսով ինվերտորների համար:Այս դեպքում AC էներգիա սպառող արգելակման ռեզիստորը ուղղակիորեն միացված է AC կողմի շարժիչին, որն ունի ավելի լայն կիրառման տիրույթ:
Արգելակման ռեզիստորը կազմաձևված է շարժիչի կողմում, որպեսզի սպառի շարժիչի էներգիան, որպեսզի հասնի շարժիչի արագ կանգառին:Արգելակման դիմադրության և շարժիչի միջև կազմաձևված է բարձր լարման վակուումային անջատիչ:Նորմալ պայմաններում վակուումային անջատիչը գտնվում է բաց վիճակում, իսկ շարժիչը նորմալ է:Արագության կարգավորում կամ հոսանքի հաճախականության շահագործում, արտակարգ իրավիճակներում շարժիչի և հաճախականության փոխարկիչի կամ էլեկտրական ցանցի միջև վակուումային անջատիչը բացվում է, իսկ շարժիչի և արգելակման դիմադրության միջև վակուումային անջատիչը փակ է, և էներգիայի սպառումը Շարժիչի արգելակումն իրականացվում է արգելակման դիմադրության միջոցով:, դրանով իսկ հասնելով արագ կայանման էֆեկտին։Համակարգի մեկ տողային դիագրամը հետևյալն է.
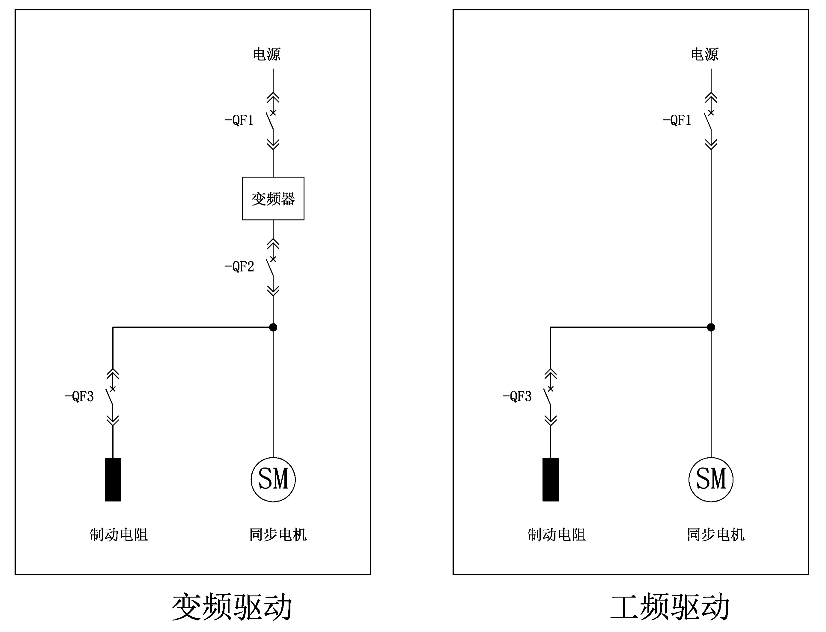
Արտակարգ արգելակման մեկ գծի դիագրամ
Արտակարգ արգելակման ռեժիմում և դանդաղեցման ժամանակի պահանջներին համապատասխան, գրգռման հոսանքը կարգավորվում է սինխրոն շարժիչի ստատորի հոսանքը և արգելակման ոլորող մոմենտը կարգավորելու համար՝ դրանով իսկ հասնելով շարժիչի դանդաղման արագ և վերահսկելի հսկողության:
Փորձնական մահճակալի նախագծում, քանի որ գործարանային էլեկտրացանցը թույլ չի տալիս էլեկտրաէներգիայի հետադարձ կապ, ապահովելու համար, որ էներգահամակարգը կարող է անվտանգ կանգ առնել սահմանված ժամկետում (300 վայրկյանից պակաս) արտակարգ իրավիճակներում, վթարային կանգառի համակարգ՝ հիմնված ռեզիստորի էներգիայի վրա: կարգավորվել է սպառման արգելակումը:
Էլեկտրական շարժիչ համակարգը ներառում է բարձր լարման ինվերտոր, բարձր հզորության կրկնակի ոլորուն բարձր լարման շարժիչ, գրգռիչ սարք, արգելակման դիմադրության 2 հավաքածու և բարձր լարման անջատիչի պահարաններ:Բարձր լարման ինվերտորը օգտագործվում է բարձր լարման շարժիչի մեկնարկի փոփոխական հաճախականության և արագության կարգավորման համար:Կառավարման և գրգռման սարքերը օգտագործվում են շարժիչին գրգռման հոսանք ապահովելու համար, և բարձր լարման անջատիչի չորս կաբինետներ՝ հաճախականության փոխակերպման արագության կարգավորման և շարժիչի արգելակման անջատումն իրականացնելու համար:
Վթարային արգելակման ժամանակ բարձրավոլտ AH15 և AH25 պահարանները բացվում են, բարձր լարման AH13 և AH23 պահարանները փակվում են, և արգելակման դիմադրությունը սկսում է աշխատել։Արգելակման համակարգի սխեմատիկ դիագրամը հետևյալն է.
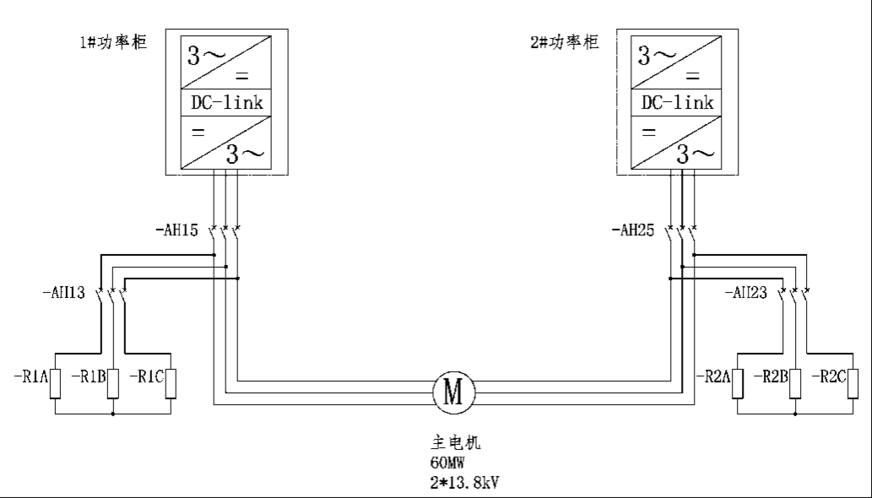
Արգելակման համակարգի սխեմատիկ դիագրամ
Յուրաքանչյուր փուլային ռեզիստորի տեխնիկական պարամետրերը (R1A, R1B, R1C, R2A, R2B, R2C,) հետևյալն են.
- Արգելակման էներգիա (առավելագույնը)՝ 25 ՄՋ;
- Սառը դիմադրություն՝ 290Ω±5%;
- Անվանական լարումը` 6,374 կՎ;
- Գնահատված հզորությունը՝ 140 կՎտ;
- Ծանրաբեռնված հզորությունը՝ 150%, 60S;
- Առավելագույն լարումը` 8կՎ;
- Սառեցման մեթոդը բնական սառեցում;
- Աշխատանքային ժամանակը` 300S:
Այս տեխնոլոգիան օգտագործում է էլեկտրական արգելակում՝ բարձր հզորության շարժիչների արգելակումը իրականացնելու համար:Այն կիրառում է սինխրոն շարժիչների արմատուրային ռեակցիան և էներգիայի սպառման արգելակման սկզբունքը շարժիչները արգելակելու համար:
Արգելակման ողջ գործընթացի ընթացքում արգելակման ոլորող մոմենտը կարող է կառավարվել՝ վերահսկելով գրգռման հոսանքը:Էլեկտրական արգելակումը ունի հետևյալ բնութագրերը.
- Այն կարող է ապահովել մեծ արգելակման ոլորող մոմենտ, որն անհրաժեշտ է միավորի արագ արգելակման համար և հասնել բարձր արդյունավետության արգելակման էֆեկտի.
- Դադարեցումը կարճ է, և արգելակումը կարող է իրականացվել ողջ գործընթացի ընթացքում.
- Արգելակման գործընթացում չկան այնպիսի մեխանիզմներ, ինչպիսիք են արգելակային արգելակները և արգելակային օղակները, որոնք առաջացնում են մեխանիկական արգելակման համակարգը միմյանց հետ շփում, ինչը հանգեցնում է ավելի բարձր հուսալիության.
- Վթարային արգելակման համակարգը կարող է գործել միայնակ՝ որպես անկախ համակարգ, կամ այն կարող է ինտեգրվել կառավարման այլ համակարգերին՝ որպես ենթահամակարգ՝ ճկուն համակարգի ինտեգրմամբ:
Հրապարակման ժամանակը՝ Մար-14-2024